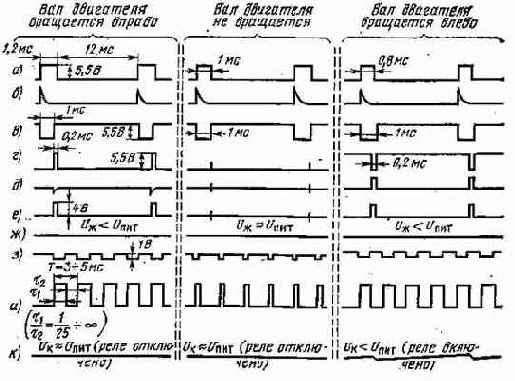
Эпюры напряжений в одновибраторе
Резистор R12 и конденсатор С1 образуют фильтр в цепи питания одновибратора, необходимый для развязывания цепей питания одновибраторов, так «как при работе рулевых машинок перепады тока, а значит, и колебания напряжения питания — значительны. Это приводит к изменению параметров импульсов одновибратора и нарушает пропорциональность отклонения рычага передатчика и рулевой машинки.
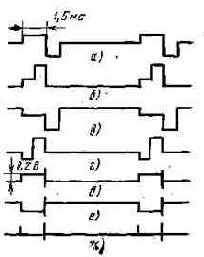
Рис. 51. Эпюры напряжений в точке А
К преимуществам описанного электронного блока по сравнению с аналоговыми следует отнести то, что оконечный усилитель работает в ключевом. режиме: открыт или закрыт. Время, в течение которого усилитель находится в закрытом или открытом состоянии, зависит от амплитуды проинтегрированного пилообразного напряжения. Как только разница в длительностях импульсов канала и одновибратора начнет приближаться к нулю, амплитуда пилообразного напряжения станет минимальной. При этом на электродвигатель поступают импульсы малой длительности, и он, замедляясь, доводит руль до нужного положения.
Рассмотренный принцип широко применяют при создании аппаратуры пропорционального управления. Схемные решения отличаются большим разнообразием, например, способом запуска одновибратора, включением переменного резистора в механической обратной связи, изменением полярности или усилением входного канального импульса, заменой усилителя на транзисторах VT5, VT6 триггером Шмитта и т. д.
Электронный блок рулевой машинки монтируют на отдельной плате. На ней размещают все элементы, кроме переменного резистора R2 и электродвигателя Ml. Рассмотрим процесс налаживания электронного блока рулевых машинок. Подборкой резисторов R1 и R3 устанавливают максимальный поворот рычага рулевой машинки. При этом удобно пользоваться управляющими сигналами передатчика. Вход электронного блока подключают к дешифратору. Гибкими проводниками подключают к плате выводы от переменного резистора R2 и электродвигателя. Включают питание, но средний вывод батарей пока оставляют сво-6.ОДНЫМ.
Рычаг рулевой машинки устанавливают в нейтральное положение. Вре менно вместо резистора R4 подключают переменный резистор сопротивлением 47 кОм. На экране осциллографа наблюдают эпюры напряжения в отдельных течках. Они должны соответствовать рис. 50. Затем подключают осциллограф ж точке А и наблюдают форму напряжения, изображенную на рис. 51,а — г. С дешифратора должны поступать импульсы, соответствующие нейтральному положению рычага командодатчика. Длительность этих импульсов — 1,5 мс.
Переменным резистором, включенным вместо R4, устанавливают такое на-яряжение смещения на базе транзистора VT1, чтобы в точке А форма сигнала соответствовала рис. 51,5 или е. Подбирая резисторы R13 или R14, нужно до-биться того, чтобы выброс напряжения наблюдался только в начале и конце канального импульса (рис. 51,яс). Измерив сопротивление переменного резистора, соответствующее этому случаю, впаивают на плату постоянный резистор R4 с. . таким же сопротивлением. Теперь подключают средний, вывод батареи. Двигатель рулевой машинки должен при этом остаться в нейтральном положении, а яри изменении команды, т. е. при перемещении рычага командоотдатчика передающего устройства, он должен равномерно вращаться. Транзисторы структуры р-n-р в усилителе постоянного тока следует применять с коэффициентом переда-чи тока базы Л21Э>80.
7. ПРОПОРЦИОНАЛЬНОЕ УПРАВЛЕНИЕ СКОРОСТЬЮ МОДЕЛИ С ХОДОВЫМ ЭЛЕКТРОДВИГАТЕЛЕМ
Большинство авто-и судомоделей приводится в движение электродвигателями. Развитие модельной техники пропорционального управления позволило-решить задачу реверса ходового электродвигателя и плавное регулирование частоты вращения его вала в обоих направлениях. Плавное регулирование скорости движения дает возможность проводить модель безошибочно по сложным трассам.
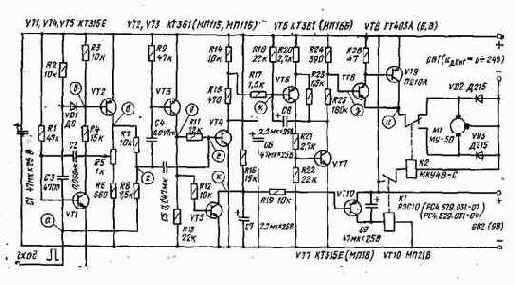
Рис. 52. Схема пропорционального управления частотой вращения вала ходового электродвигателя
Рассмотрим один из вариантов пропорционального управления частотой вращения ходового электродвигателя.Электронный блок этого своеобразного механизма преобразует длительность канальных импульсов в частоту вращения вала ходового электродвигателя и обеспечивает его реверсирование. Для управления таким блоком подходят импульсные системы пропорционального многоканального радиоуправления, у которых длительность канальных импульсов находится в пределах от 1±0,5 до 2 ±0,5 мс. Амплитуда канальных импульсов должна быть 4 — 9 В.